ROS Package Development
About this Project
I’m a skilled ROS package developer with a passion for building robust and effective software solutions for diverse robotic systems. I’ve successfully implemented navigation, perception, and control packages for various robots, including mobile manipulators, autonomous mobile robots, and humanoid robot systems.
Key Projects
Humanoid Robot Platform (Robovie-R4)

- Contributions: Developed a ROS-supported firmware and ROS package to streamline Human-Robot Interface (HRI) research using the Robovie-R4 humanoid robot.
- Impact: Significantly improved platform accessibility and development speed for HRI researchers.
- Technical Details:
- Firmware: Developed using ESP-IDF for low-level robot control and sensor communication.
- ROS Package: Provided high-level robot control APIs and integrated MoveIt for motion planning and execution.
- Technologies: ROS, MoveIt, urdf, C/C++, Linux, GitHub
- ROS package URL: https://github.com/vstoneofficial/robovie_r4_ros
video demonstrating Robovie-R4 ROS capability
 My first robot delivery!
My first robot delivery!
Wheeled robot platform (Differential drive, Mecanum Wheels)
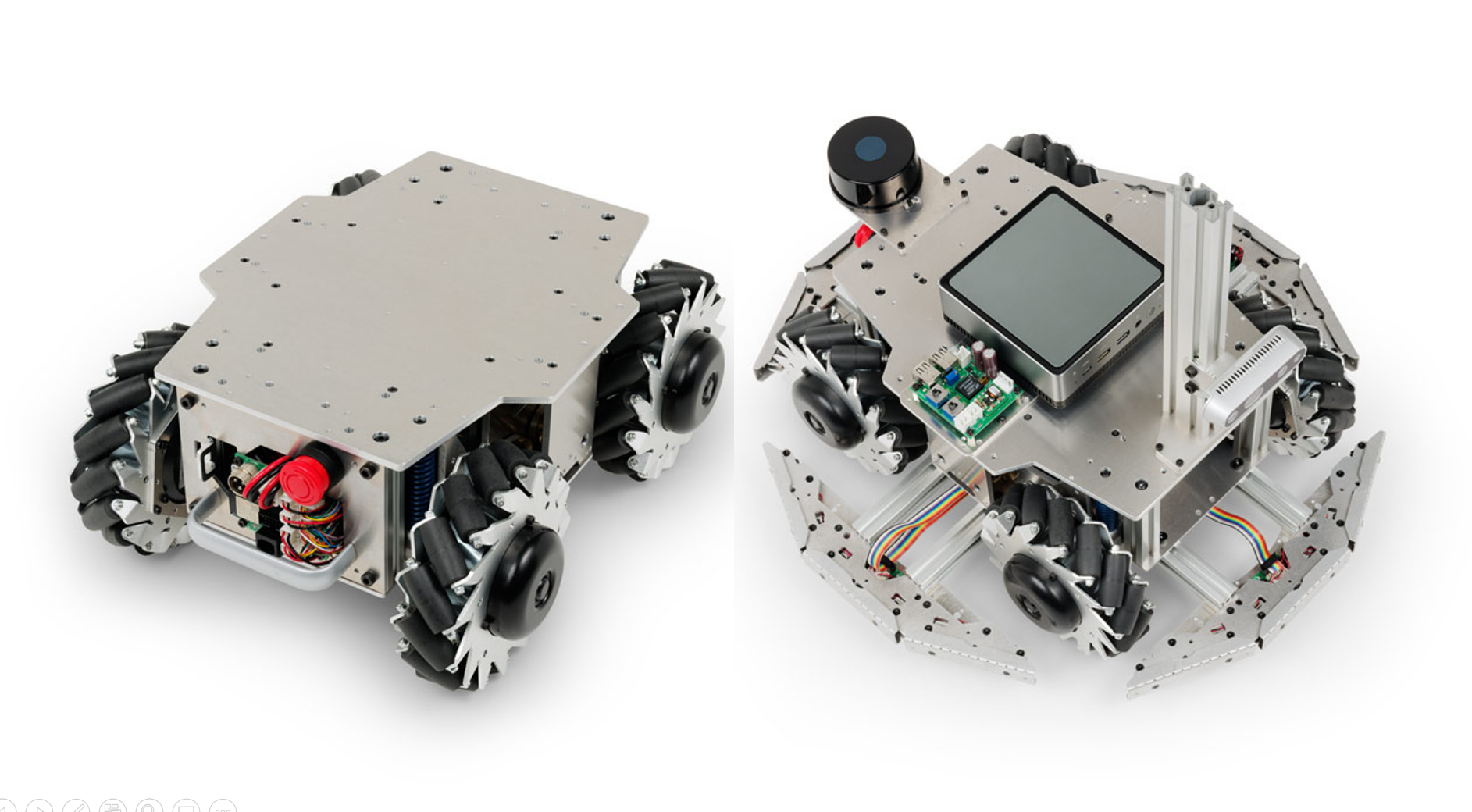
- Contributions: Designed and implemented ROS 2 packages for two mobile robots: Megarover (differential drive) and mecanumrover (omnidirectional mecanum wheels). These packages empower autonomous navigation functionalities, seamlessly integrating data from various sensor types (LRF, depth camera).
- Impact: My work directly contributed to a 20% increase in user adoption, demonstrating the enhanced accessibility and effectiveness of the robot platforms for autonomous navigation tasks.
- Technical Expertise:
- Programming Languages: C/C++
- ROS Frameworks: ROS 2, Nav2, RTAB-map
- Development Tools: Gazebo, GitHub, micro-ROS
- ROS package URL:
Leave a comment